Soft Magnetic Actuator
Soft Magnetic Actuator for Haptics.
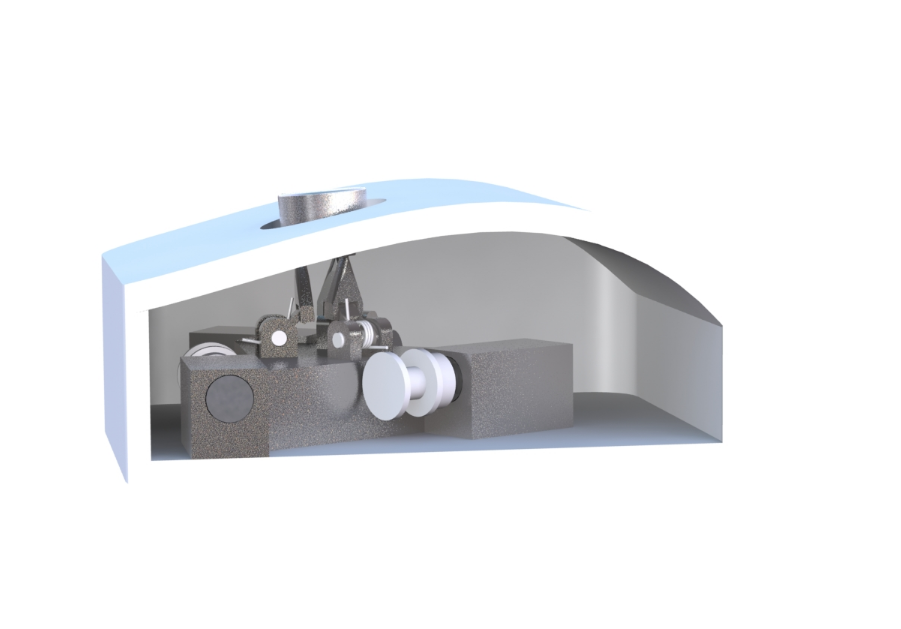
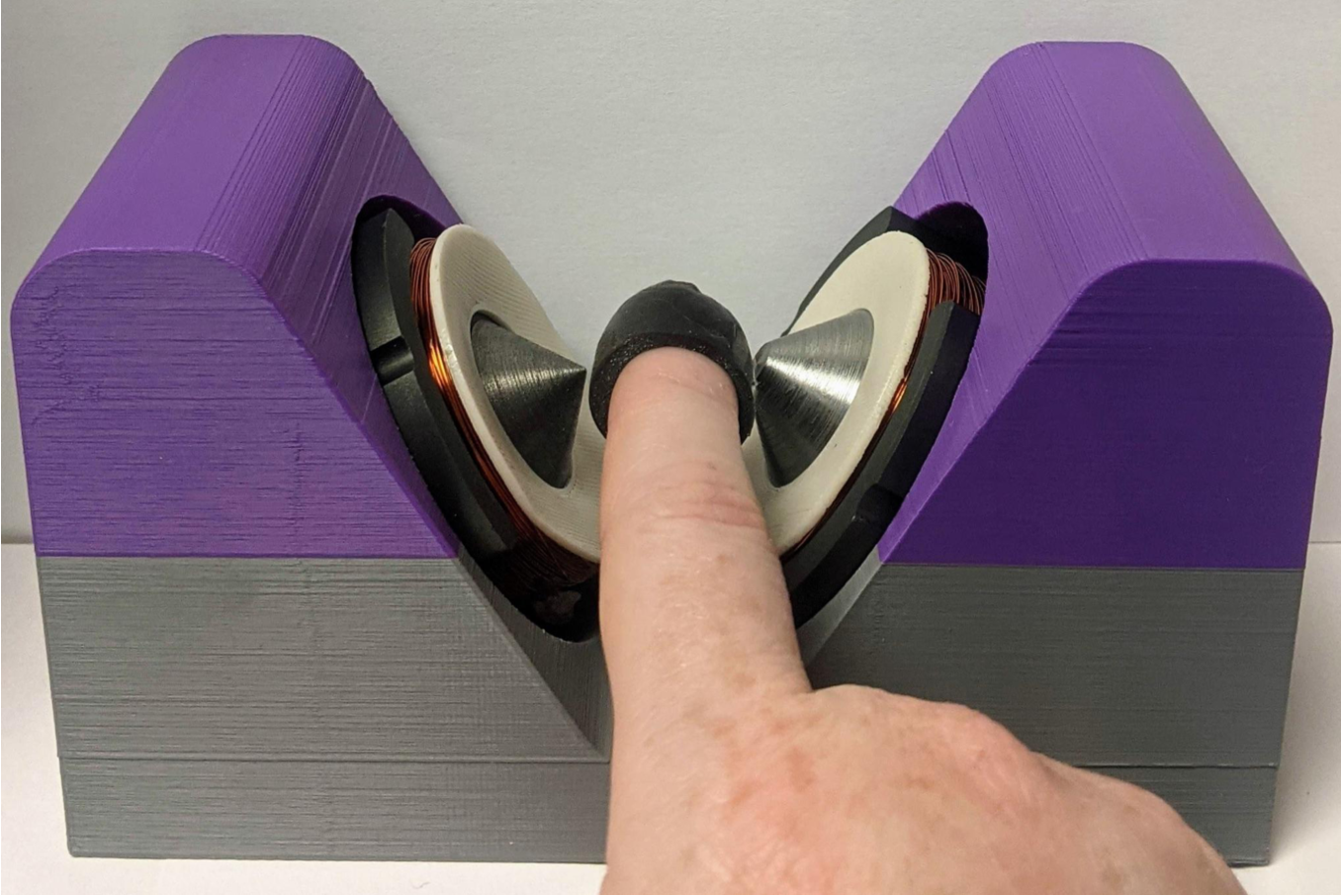
Current tactile haptic displays are either able to render tangential and normal forces in one area of actuation on the fingertip, or normal forces in multiple areas of independent actuation, but cannot provide different kinds of forces in multiple independent areas of actuation. We are currently fabricating actuators using very low modulus materials together with magnetic particles to create weakly polarized flexible magnets. These materials respond with attraction or repulsion depending on the direction of the applied magnetic field and can apply shear or normal forces depending on the placement of external electromagnets. We are also developing apparatuses in which to test these materials for efficacy in texture rendering.
Publications
Pending
Contact
- Sarah Costrell (MechE) (scostrel@andrew.cmu.edu)